IN THIS ARTICLE
PhysX Ball Joint 组件
使用PhysX Ball Joint组件中,您可以创建一个动态球形关节,将实体约束到关节中,并可以自由地围绕关节的 y 轴和 z 轴旋转。
PhysX Ball Joint 组件属性
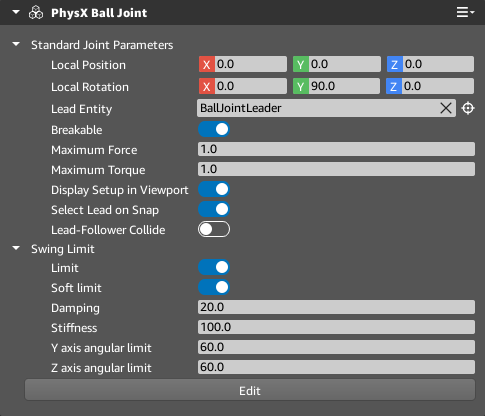
Local Position 指定关节相对于实体变换的位置。
Local Rotation 指定关节相对于实体变换的旋转。
Lead Entity 指定将驱动关节的lead(父级)实体。
Breakable 启用后,如果施加了足够的力,关节将断开。启用 Breakable 将公开 Maximum Force 和 Maximum Torque 属性。 启用了 Compute Mass 属性的 PhysX Dynamic Rigid Body 组件可能具有非常大的质量值。如果包含关节组件或引导实体的实体启用了其 Compute Mass 属性,则 Maximum Force 和 Maximum Torque 属性可能需要非常高的值才能防止断裂。
Maximum Force 启用 Breakable 后,指定关节在断开之前可以承受的最大力。有效值范围从 0.01 到 Infinity。
Maximum Torque 启用 Breakable 后,指定关节在断开之前可以承受的最大扭矩。有效值范围从 0.01 到 Infinity。
Display Setup in Viewport 启用后,将显示表示球形关节的方向和限制的圆锥体,以及表示关节与其从动轮之间的连接的线。圆锥体的形状由 Y axis angular limit 和 Z axis angular limit定义。
Select Lead on Snap 启用后,在组件模式下将关节捕捉到实体会将该实体设置为 Lead Entity。包含关节零部件的实体将从此操作中排除。
Lead-Follower Collide 启用后,lead 实体和 follower 实体(包含关节组件的实体)将发生碰撞。
Limit 启用后,引导实体围绕关节轴的移动受角度限制。启用 Limit 会显示 Soft Limit、Y axis angular limit和 Z axis angular limit 属性。
Soft Limit 启用后,允许引导实体围绕关节轴的移动超过指定的限制。启用 Soft Limit 后,当引导实体旋转超过限制时,引导实体的移动将被视为弹簧,并且会减慢,然后弹回到限制区域。启用 Soft Limit 将显示 Damping 和 Stiffness 属性。
Damping 启用 Soft Limit 后,当超出旋转限制时,弹簧的驱动力相对于从动件的速度。有效值范围为 0.001 到 1000000.0。
Stiffness 启用 Soft Limit 后,当超出旋转限制时,弹簧的驱动力相对于从动件的位置。有效值范围为 0.001 到 1000000.0。
Y axis angular limit 启用 Limit 时围绕关节 y 轴的旋转限制。有效值范围为 0.1 到 180.0。
Z axis angular limit 启用 Limit 时围绕关节的 z 轴的旋转限制。有效值范围为 0.1 到 180.0。
Edit 单击后,将启用组件编辑模式。在组件编辑模式下,除 PhysX Ball Joint 组件外,所有组件都被锁定。PhysX Ball Joint(PhysX 球关节)组件的属性可以在 Perspective中编辑。按 Tab 在组件编辑模式之间循环。单击 Done 退出组件模式。