IN THIS ARTICLE
PhysX Ragdoll 组件
您可以使用 PhysX Ragdoll 组件在动画系统中创建角色的物理表示,并模拟某些行为,例如命中反应和角色死亡。物理表示由具有简单形状的刚体层次结构组成,这些刚体通过关节连接。您可以根据需要调整人偶设置,以获得物理真实性和性能。
PhysX Ragdoll组件需要 PhysX gem。
有关 PhysX 系统的更多信息,请参阅 使用 PhysX 系统模拟物理行为。
使用PhysX Ragdoll组件
您可以使用 PhysX 系统和 Animation Editor 创建人偶。
使用 PhysX Ragdoll 组件
在 O3DE Editor 中,将 PhysX Ragdoll 组件添加到表示角色的实体中。有关详细信息,请参阅 向实体添加组件。
选择 Tools, Animation Editor。
使用 Animation Editor 创建和控制人偶的物理表示形式。有关详细信息,请参阅 创建和模拟 PhysX 人偶。
PhysX Ragdoll 组件属性
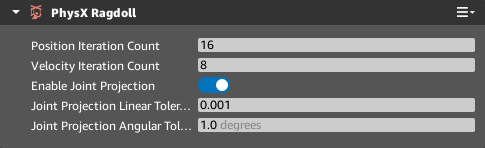
| 属性 | 说明 |
|---|---|
| Position Iteration Count | 指定用于关节稳定性和准确性的迭代次数。 迭代计数越高,行为越真实,但性能越低。 较低的迭代计数可能会导致不切实际的行为,例如关节分离以及人偶的某些部分与地形相交。默认值:16 有效值:1到255 |
| Velocity Iteration Count | 指定用于解决碰撞的迭代次数,例如恢复 (弹性) 和刚体相交。 迭代次数越多,根据材质设置解决碰撞,但会降低性能。 使用较低的迭代计数来减少人偶的恢复。 默认值:16 有效值:1到255 |
| Enable Joint Projection | 如果设置,则关节投影将在要求苛刻的情况下保留关节约束,例如人偶的某些部分以高能量移动。此设置可能会提高物理合理性。默认启用。 |
| Joint Projection Linear Tolerance | PhysX 系统在每个关节中允许的最大线性偏差。由于抖动,不建议使用小于0.001米的值。 要编辑此属性,必须设置 Enable Joint Projection 属性。默认值: 0.001 |
| Joint Projection Angular Tolerance | PhysX 系统在每个关节中允许的最大角度偏差。由于抖动,不建议使用小于 1 度的值。 要编辑此属性,必须设置 Enable Joint Projection 属性。默认值: 1 |