IN THIS ARTICLE
PhysX Dynamic Rigid Body 组件
PhysX Dynamic Rigid Body 使实体成为可以移动并与其他 PhysX 实体碰撞的 模拟 或 运动 实体对象。该实体还必须至少有一个 PhysX Shape Collider, PhysX Primitive Collider 或 PhysX Mesh Collider组件,用于定义实体的碰撞器。
模拟的刚体完全由 PhysX 驱动。模拟的刚体会响应碰撞事件和力而移动,并且不会通过运动或脚本进行动画处理。默认情况下,模拟刚体受重力影响,但可以在 PhysX Dynamic Rigid Body (PhysX 动态刚体) 组件中停用重力。
运动学刚体不完全由 PhysX 驱动。它们具有脚本动画,不受力或重力的影响。例如,门通常具有脚本动画。如果门是运动学刚体,则门可以在脚本动画中移动,并在模拟期间与其他 PhysX 实体碰撞。移动是使用您在脚本中指定的 SetKinematicTarget 方法创建的。
Note:您应始终将 PhysX Dynamic Rigid Body (PhysX 动态刚体) 组件添加到实体层次结构的顶层。将 PhysX Dynamic Rigid Body (PhysX 动态刚体) 组件添加到子实体可能会导致与实体的世界变换发生冲突,并导致未定义的行为。
提供者
属性
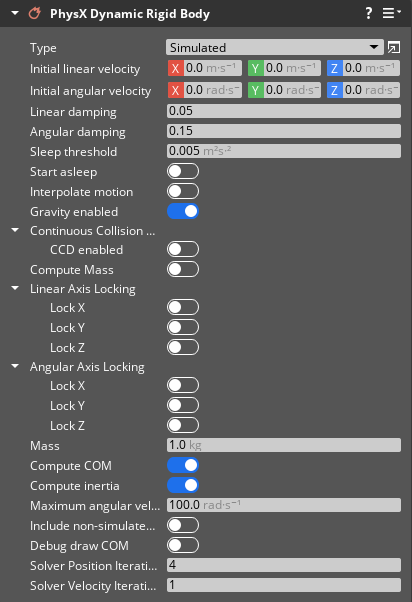
| 属性 | 说明 | 值 | 默认值 |
|---|---|---|---|
| Type | 确定如何控制刚体的移动/位置。模拟的刚体响应碰撞事件和力,其运动由 PhysX 模拟。运动学刚体不受重力或其他力的影响,可以通过脚本移动。 | Simulated, Kinematic | Simulated |
| Initial linear velocity | 设置激活实体时刚体的起始线速度(以米/秒为单位)。这将创建沿线性速度矢量方向的运动。 | Vector3: -Infinity to Infinity | X: 0.0, Y: 0.0, Z: 0.0 |
| Initial angular velocity | 设置激活实体时刚体的起始角速度(以弧度/秒为单位)。这将在角速度矢量的方向上创建旋转。 | Vector3: -Infinity to Infinity | X: 0.0, Y: 0.0, Z: 0.0 |
| Linear damping | 设置线性速度随时间变化的衰减速率,即使没有力作用在刚体上。如果未应用线性力,则非零值最终会停止刚体。值必须为非负数。 | Float: 0 to Infinity | 0.05 |
| Angular damping | 设置角速度随时间变化的衰减速率,即使没有力作用在刚体上。如果未施加扭矩力,则非零值最终会停止刚体。值必须为非负数。 | Float: 0.0 to Infinity | 0.15 |
| Sleep threshold | 设置每单位质量的动能,低于该动能时,刚体可以进入休眠状态。值必须为非负数。 | Float: 0.0 to Infinity | 0.005 |
| Start asleep | 如果启用,则 PhysX Dynamic Rigid Body (PhysX 动态刚体) 组件在激活实体时处于休眠状态,并在施加足够的力时唤醒。 | Boolean | Disabled |
| Interpolate motion | 如果启用,则模拟产生的运动将平滑。为需要平滑运动的对象(如车辆)启用此属性。 | Boolean | Disabled |
| Gravity enabled | 如果启用,则刚体会受到重力的影响。这仅适用于模拟刚体。 | Boolean | Enabled |
| CCD enabled | 如果启用,则执行连续冲突检测 (CCD)。此属性对于高速对象非常有用,可确保准确的碰撞检测。激活此属性将显示两个附加属性,即 Min advance coefficient 和 CCD Friction。要使用连续碰撞检测,您还必须在 PhysX Configuration 窗口中激活 Continuous Collision Detection。有关更多信息,请参阅 PhysX 配置。 | Boolean | Disabled |
| Min advance coefficient | 微调连续碰撞检测。较低的值会减少剪切,但会影响运动平滑度。 | Float: 0.01 to 0.99 | 0.15 |
| CCD friction | 如果启用,则在解决 CCD 碰撞时应用摩擦。 | Boolean | Disabled |
| Compute mass | 如果启用,则计算刚体的质量。 | Boolean | Disabled |
| Linear Axis - Lock X | 如果启用,力不会在刚体的 X 轴上创建平移。 | Boolean | Disabled |
| Linear Axis - Lock Y | 如果启用,力不会在刚体的 Y 轴上创建平移。 | Boolean | Disabled |
| Linear Axis - Lock Z | 如果启用,力不会在刚体的 Z 轴上创建平移。 | Boolean | Disabled |
| Angular Axis - Lock X | 如果启用,力不会在刚体的 X 轴上产生旋转。 | Boolean | Disabled |
| Angular Axis - Lock Y | 如果启用,力不会在刚体的 Y 轴上创建旋转。 | Boolean | Disabled |
| Angular Axis - Lock Z | 如果启用,力不会在刚体的 Z 轴上产生旋转。 | Boolean | Disabled |
| Mass | 如果禁用了 Compute Mass(计算质量)**,则可以为 PhysX Dynamic Rigid Body (PhysX 动态刚体) 指定 Mass 值(以千克为单位)。 | Float: 0.0 to Infinity | 1.0 |
| Compute COM | 如果启用,则会自动计算刚体的质心。 | Boolean | Enabled |
| COM offset | 如果 Compute COM 处于禁用状态,则可以将质心指定为偏移量。 | Vector3: -Infinity to Infinity | X: 0.0, Y: 0.0, Z: 0.0 |
| Compute inertia | 如果启用,则根据刚体的质量和形状计算惯性。 | Boolean | Enabled |
| Inertia diagonal | 如果禁用 Compute inertia,则可以将 Inertia diagonal 指定为惯性张量的对角线元素。这是在每个轴上旋转刚体所需的扭矩。 | Vector3: 0.0 to Infinity | X: 1.0, Y: 1.0, Z: 1.0 |
| Maximum angular velocity | 将角速度限制为指定值。这在刚体以不切实际的快速角速度旋转的情况下非常有用。 | Float: 0.0 to Infinity | 100.0 |
| Include non-simulated shapes in Mass | 如果启用,则非模拟形状将包含在质量、质心和惯性计算中。 | Boolean | Disabled |
| Debug draw COM | 如果启用,则显示此刚体的质心。 | Boolean | Disabled |
| Solver Position Iterations | 计算物体位置更新时使用的迭代次数。较高的值可能会提高模拟保真度,但会增加计算成本。 | Integer: 1 to 255 | 4 |
| Solver Velocity Iterations | 计算物体的速度更新时使用的迭代次数。较高的值可能会提高模拟保真度,但会增加计算成本。 | Integer: 1 to 255 | 1 |