IN THIS ARTICLE
ROS 2 Lidar Sensor 组件
ROS 2 Lidar Sensor 组件封装了激光雷达的仿真,包括数据采集和发布。 它使用抽象来实现易于替换的实现,但在如何获取点方面有所不同。 激光雷达可用于障碍物检测、定位和导航等任务。
属性
依赖
属性
| 属性 | 说明 | 值 | 默认值 |
|---|---|---|---|
| Sensor Configuration | 请参阅 Sensor Configuration 属性 | ||
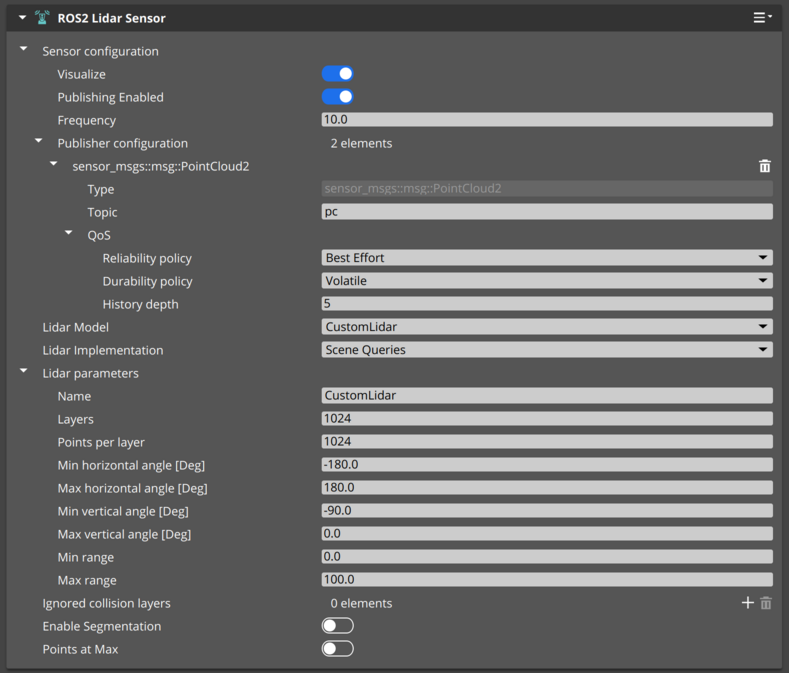
| Lidar Model | 这是什么类型的激光雷达。这可以是自定义的,也可以是对应于真实设备的。 | Enumeration | Custom3DLidar |
| Lidar Implementation | 用于光线投射(或其他获取数据的方法)的机制。实现可以由外部 Gem 注册。 | Enumeration | SceneQueries |
| Ignore Collision Layers | 采集数据时要忽略的碰撞层。这对于避免传感器网格本身的阻碍非常有用。 | List | empty |
| Points At Max | 是否为超出最大范围(无穷大值)的值返回点。 | Boolean | false |
请注意,根据激光雷达的实现,可能存在一些其他属性。 您可以修改自定义激光雷达的激光雷达参数,但不能修改特定激光雷达模型的激光雷达参数。 它们具有更复杂的射击模式,这些模式仅大致反映在这些属性中。
| 属性 | 说明 | 值 | 默认值 |
|---|---|---|---|
| Name | 激光雷达的名称,反映模型的选择 | String | CustomLidar |
| Layers | 激光雷达具有多少个垂直图层。 | Integer | 24 |
| Points per layer | 激光雷达返回的每个图层的点数。 | Integer | 924 |
| Layers | 激光雷达具有多少个垂直图层。 | Integer | 24 |
| Min Horizontal Angle | 激光雷达发射模式的最小水平角 (度)。 | Float | -180.0 |
| Max Horizontal Angle | 激光雷达发射模式的最大水平角度(度)。 | Float | 180.0 |
| Min Vertical Angle | 激光雷达发射模式的最小垂直角 (度)。 | Float | -35.0 |
| Max Vertical Angle | 激光雷达发射模式的最大垂直角(度)。 | Float | 35.0 |
| Min range | 激光雷达返回点的最小距离。 | Float | 0.0 |
| Max range | 激光雷达返回实际点的最大距离。请注意,如果设置了 Points At Max ,则数据将包含最大范围的无穷大值点。 | Float | 100.0 |
用法
将 ROS 2 Lidar Sensor 添加到您的机器人中,以模拟激光雷达数据。选择激光雷达实现和要模拟的模型。
如果您有 NVIDIA 显卡,请考虑 RGL Gem 提供的高效 GPU 实现。 它比基于 Physics scene 查询的默认实现快几个数量级。RGL Gem 还支持多种流行的激光雷达模型。