IN THIS ARTICLE
Kythera AI 导航网格生成
边界设置
要生成导航网格,您需要在关卡中至少有一个导航网格边界。
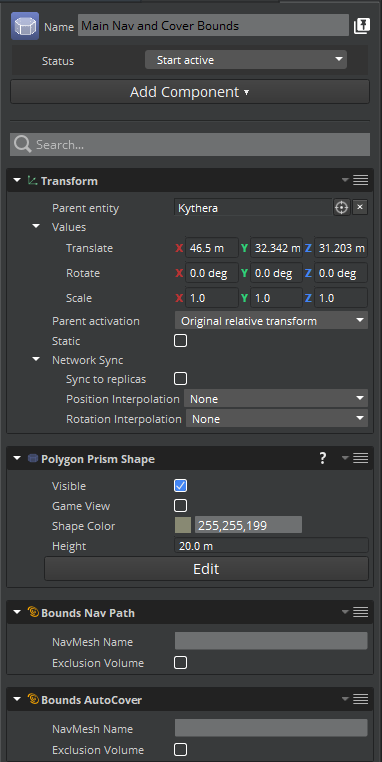
要声明导航网格边界,请创建一个具有 Polygon Prism Shape 组件的实体来形成边界,并使用 Bounds Navigate Path 组件对其进行标记以生成导航网格。
排除卷
如果边界对象选中了 Exclusion Volume 属性,则会导致在边界内生成导航网格 not。与排除体积相交的切片将被裁剪。
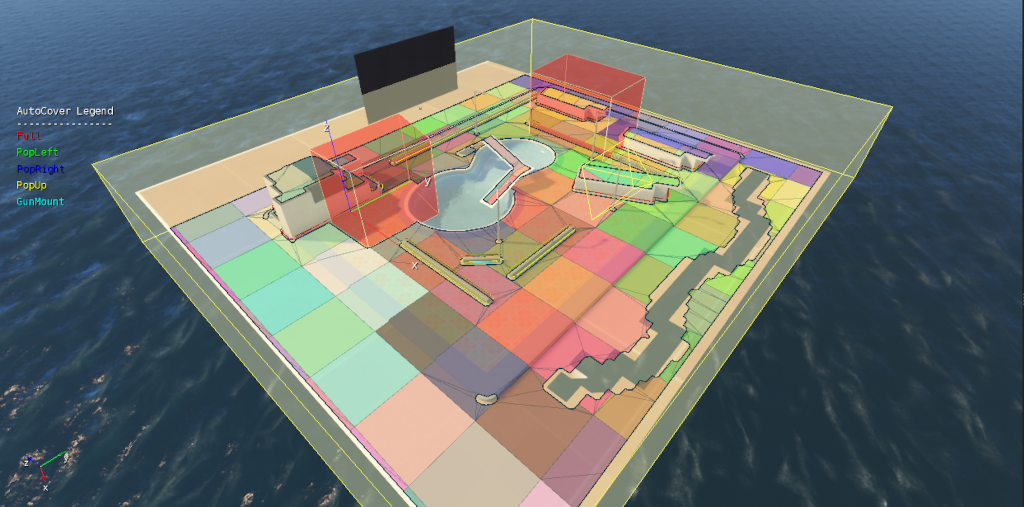
为了更好地区分导航网格边界和排除体积,您可以设置 Polygon Prism Shape 组件的颜色。在以下示例中,排除卷的颜色为红色:
配置
导航网格生成的设置在NavMesh.xml文件中配置。全局NavMesh.xml放置在项目的Scripts或Levels目录中。对于特定于关卡的导航网格,可以在关卡的子目录中放置一个 NavMesh.xml。
此文件中可以指定多个导航网格。例如,可以为小角色和大角色指定单独的导航网格。
必须在.xml的NavMeshNames部分中指定每个导航网格,声明其名称和类型。请参阅以下示例 NavMesh.xml 文件。
<NavMeshParams>
<DefaultNavMeshName type="string">Default</DefaultNavMeshName>
<DefaultNavMeshType type="string">MediumSizedCharacters</DefaultNavMeshType>
<NavMeshNames type="bb">
<Default type="bba">
<Entry0 type="string">MediumSizedCharacters</Entry0>
</Default>
<Boss type="bba">
<Entry0 type="string">LargeSizedCharacters</Entry0>
</Boss>
</NavMeshNames>
<NavMeshTypes type="bb">
<MediumSizedCharacters type="bb">
<AgentHeight type="float">1.720000</AgentHeight>
<AgentMaxClimb type="float">0.700000</AgentMaxClimb>
<AgentMaxSlope type="float">45.000000</AgentMaxSlope>
<AgentRadius type="float">0.600000</AgentRadius>
<CellHeight type="float">0.050000</CellHeight>
<CellSize type="float">0.100000</CellSize>
<Regenerate type="bool">false</Regenerate>
</MediumSizedCharacters>
<LargeSizedCharacters type="bb">
<AgentHeight type="float">1.800000</AgentHeight>
<AgentMaxClimb type="float">0.700000</AgentMaxClimb>
<AgentMaxSlope type="float">45.000000</AgentMaxSlope>
<AgentRadius type="float">2.000000</AgentRadius>
<CellHeight type="float">0.050000</CellHeight>
<CellSize type="float">0.100000</CellSize>
<Regenerate type="bool">false</Regenerate>
</LargeSizedCharacters>
</NavMeshTypes>
</NavMeshParams>
过滤物理对象以生成导航网格
Kythera AI 可以筛选在生成导航网格时考虑哪些物理对象。这是通过使用 PhysX Collision Group 来执行的。与指定碰撞组碰撞的对象将被视为导航网格生成,而不与碰撞组碰撞的对象将被忽略。通过在 NavMesh.xml 的每个导航网格类型参数中设置NavmeshPhysicsCollisionGroup参数,可以基于每个导航网格类型设置碰撞组。请参阅 PhysXTest 演示关卡,了解此功能的实际应用示例,其中导航网格生成会忽略“幽灵树篱”。
生成导航网格
要生成或重新生成导航网格,请选择 Kythera 工具栏上的 Regenerate Navmesh 按钮 ( )或使用 console 命令
)或使用 console 命令kyt_Generate。
保存导航网格
要将导航网格保存到磁盘,请选择 Kythera 工具栏上的 Save Navmesh 按钮 ( ),或使用 console 命令
),或使用 console 命令 kyt_SaveTiles。
对于较小的关卡,通常不需要保存导航网格。小的导航网格将在运行时自动生成。
可视化
要启用导航网格调试绘制,请选择 Debug Draw Navmesh (调试绘制导航网格) 按钮( ),或将控制台变量
),或将控制台变量kyt_DrawMaster和kyt_DrawNavMesh设置为1。大于 1 的值将更改导航网格的绘制方式的细节。
可以使用 Kythera 工具栏中的组合框选择要可视化的导航网格。默认值为 Default navmesh。或者,您可以将控制台变量kyt_DrawNavMeshName设置为要可视化的导航网格的名称。
将导航网格分配给代理
为代理分配一个导航网格,以便在全局 Profiles.xml 文件中使用。
<NavMeshName type="string">Default</NavMeshName><NavMeshType type="string">MediumSizedCharacters</NavMeshType>
如果未在代理的配置文件中指定导航网格名称或类型,则使用NavMesh.xml中的DefaultNavMeshName和/或DefaultNavMeshType的值。