IN THIS ARTICLE
使用 PhysX 的动态关节
PhysX 关节组件约束一个 PhysX 动态刚体(称为 跟随者)相对于另一个刚体(称为 前导)的位置和方向。跟随者刚体将在关节周围的零个、一个或两个轴上具有旋转自由度,具体取决于 PhysX 关节的类型。
下面的示例图像是不同关节类型的简单演示。在每个示例中,蓝色球体是前导刚体。红色球体是跟随者刚体,它必须始终是模拟的刚体。关节组件始终是 follower 实体的一部分。将关节添加到从动节点后,需要将其配置为放置在引线周围(使用关节组件的 Local Position 和 Local Rotation 属性)。在此示例中,球和铰链引线是静态刚体,但它们也可以是运动学或模拟刚体。
内容
PhysX 关节类型
有关三种 PhysX 关节类型的信息,请参阅下面的链接组件参考:
- PhysX Ball Joint 组件参考 - PhysX Ball Joint 组件允许 Follower 刚体在两个轴上自由旋转。
- PhysX Fixed Joint 组件参考 - PhysX Fixed Joint 组件不允许 Follower 刚体在任何轴上自由旋转。
- PhysX Hinge Joint 组件参考 - PhysX Hinge Joint 组件允许 Follower 刚体在一个轴上自由旋转。
- PhysX Prismatic Joint 组件参考 - PhysX Prismatic Joint 组件保持相同的旋转,但允许从动刚体沿一个轴自由移动。
PhysX 关节设置
每种关节类型的设置都是相同的。
为 leader 刚体创建实体。
创建新实体。右键单击 Perspective,然后从上下文菜单中选择 Create enity。
添加 PhysX Static Rigid Body 或 PhysX Dynamic Rigid Body(类型 kinematic 或 simulated)组件,具体取决于您是否希望领导者移动。
将 PhysX 碰撞器添加到实体。
为 follower 刚体和关节创建一个实体。
创建新实体。
将 PhysX Dynamic Rigid Body (类型 simulated) 组件添加到实体。
将 PhysX 碰撞器添加到实体。这是 angle limits 正常工作所必需的。在没有 PhysX 碰撞器的情况下,关节仍然可以工作,但有角度限制,并且可能不会强制执行。使用触发器碰撞器时也是如此。
添加其中一个 PhysX 关节组件:
- PhysX Ball Joint
- PhysX Fixed Joint
- PhysX Hinge Joint
- PhysX Prismatic Joint
通过单击 Lead Entity 属性右侧的 Target 按钮,然后在 Perspective 中选择引线实体,将引线实体分配给 PhysX 关节。
调整关节的位置和方向,将其移动到引线的位置。使用 PhysX 关节组件中的 Local Position 和 Local Rotation 字段。您可以通过单击 Edit 按钮进入组件模式,并在 Perspective中配置关节。
Note:从动轮刚体不需要具有引导刚体。当 follower 没有 leader 时,它将受到全局位置的约束。
使用组件编辑模式的 PhysX 关节配置
关节组件具有一个 Edit 按钮,用于启用组件编辑模式。在组件编辑模式下,您可以在 Perspective 中编辑关节的属性。您可以在组件编辑模式下使用多个编辑上下文之一。按 Tab 键可在编辑模式上下文之间循环。当前上下文显示在 Perspective 窗格的底部。
Position mode
Applies to: 球形接头、固定接头和铰链接头
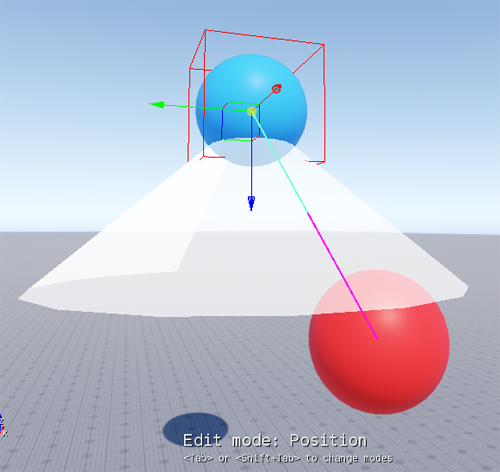
Position (位置) 模式显示一个平移 Gizmo,您可以单击并拖动该 Gizmo 来调整关节相对于实体变换的 Local Position(本地位置)。
Rotation mode
Applies to: 球形接头、固定接头和铰链接头
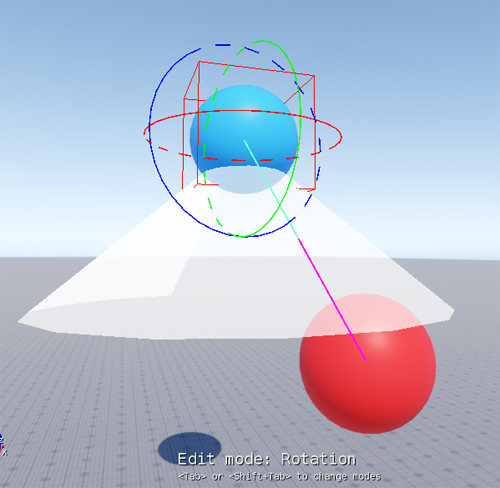
Rotation (旋转) 模式显示一个旋转小工具,您可以在任何轴上单击并拖动该小工具,以调整关节相对于实体变换的 Local Rotation (局部旋转)。
Snap position mode
Applies to: 球形接头和铰链接头
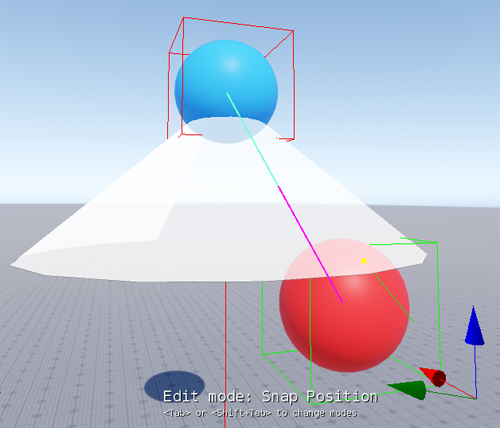
当您将鼠标悬停在实体上时,Snap position (对齐位置) 模式会显示高亮显示边界框和目标。单击实体以将关节 Local Position 对齐到高亮显示的实体的位置。如果在关节属性中启用了 Select Lead on Snap,则该实体将被分配给关节的 Lead Entity 属性。可以选择除 follower 实体之外的任何实体。
Snap rotation mode
Applies to: 球形接头
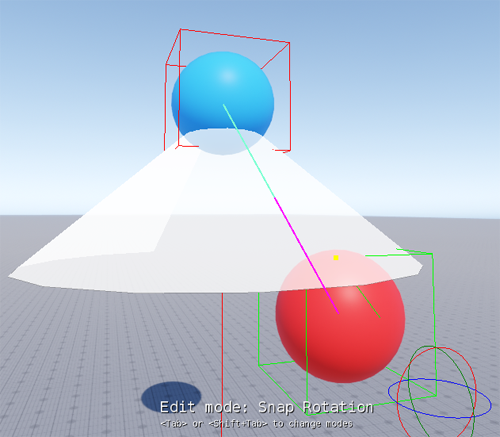
当您将鼠标悬停在实体上时,Snap rotation 模式会显示高亮显示边界框和目标。单击实体以将关节 Local Rotation 与高亮显示的实体的旋转对齐。可以选择除引导实体之外的任何实体。
Maximum Force and Maximum Torque modes
Applies to: 球形接头、固定接头和铰链接头
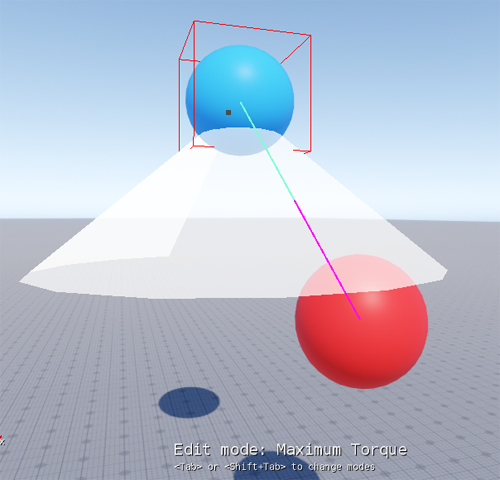
最大力和最大扭矩模式显示一个灰色框,您可以单击并拖动该框来调整 最大力 和 最大扭矩 属性。最大力和最大扭矩模式和属性仅在为关节启用 Breakable 属性时可用。
Swing limits mode
Applies to: 球形接头
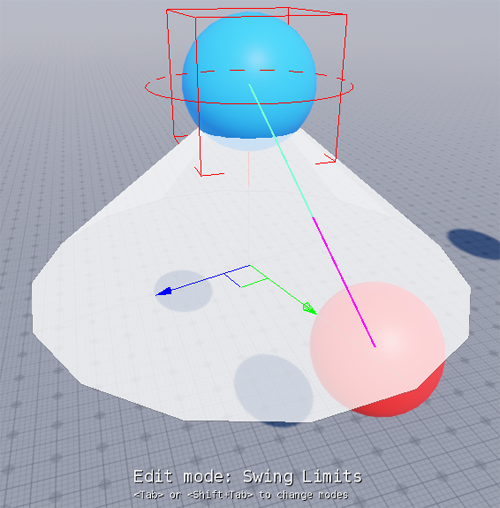
“摆动限制”模式在关节的局部根部显示一个环形 Gizmo,可用于旋转关节 x 轴上的摆动限制,以及一个缩放 Gizmo,可用于在关节的 y 轴和 z 轴上均匀或不均匀地缩放摆动限制。仅当为球关节组件启用了 Limits 属性时,Swing limits 模式才可用。
Twist limits mode
Applies to: 铰链关节
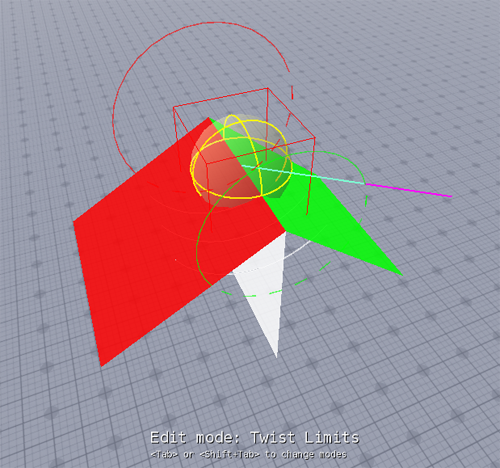
Twist limits (扭曲限制) 模式显示两个环形小工具,您可以单击并拖动这两个小工具来调整 正角度限制 和 负角度限制 属性。红色环调整正限制,绿色环调整负限制。仅当为铰链关节组件启用了 Limits 属性时,Twist limits 模式才可用。
Stiffness and Damping modes
Applies to: 球形接头和铰链接头
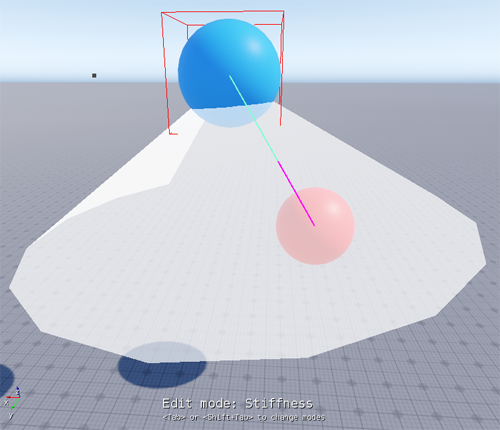
Stiffness (刚度) 和 damping (阻尼) 模式显示一个灰色框,您可以单击并拖动该框来调整 Stiffness 和 Damping 属性。刚度和阻尼模式和属性仅在为关节启用 Soft limit 属性时可用。
稳定性说明
PhysX 关节使用的迭代求解器可能无法在某些配置中保持约束。例如,求解器可能无法收敛。结果是模拟过程中的运动不稳定或意外。PhysX 文档介绍了有助于避免此类情况的配置。请参阅 NVIDIA 的 PhysX 关节文档中的 配置关节以实现最佳行为 。