IN THIS ARTICLE
抓手
概述
夹持器是机器人操作中使用最广泛的效应器之一。 模拟机器人夹持器由 ROS 2 动作服务器控制,允许用户跟踪 gipping 操作的当前状态。 通过动作服务器控制夹持器的 API 在 control_msgs .
Note:这些抓取器可在ROS2ControllersGem中获取。
支持的功能
有两种夹具可供选择:
- 真空抓手
- 手指夹持器
真空抓手
真空抓手模拟经过简化,相当于向纵对象添加一个固定关节,该对象需要具有“Grippable”标签。 真正的真空抓手的有效性范围有限,因为需要通过精确定位来形成对产生真空至关重要的密封。 为了模拟此类行为,Vacuum Gripper 组件具有以下参数:
- Effector Trigger Collider (效果器触发器碰撞器)
- Effector Articulation Link(执行器关节链接)
效应器触发器碰撞器是具有 PhysX 碰撞器组件的实体。
PhysX collider (PhysX 碰撞器) 组件必须设置为 trigger。要了解有关触发器的更多信息,请参阅
PhysX Collider (PhysX 碰撞器) 组件文档.
PhysX collider (PhysX 碰撞器) 组件需要调整到模拟抓手的预期范围。
触发器碰撞器的示例配置如下所示:

Effector Articulation Link (效应器关节链接) 是具有 PhysX Articulation Link (PhysX 关节链接) 的实体。
此实体将是与纵对象形成关节的父实体。
您需要在
标签组件 中为实体添加“可抓取”标签,以便在模拟中抓取该实体。这可以防止抓手附着在地面和其他意外物体上:
总而言之,以下是 ROS2 操作模板中使用的真空抓手的示例配置: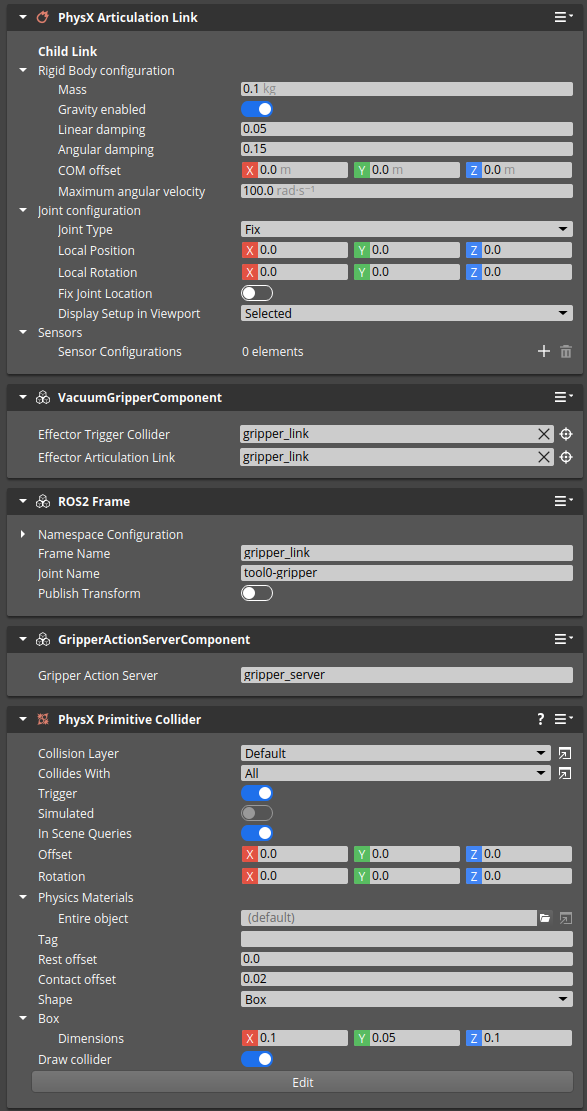
手指夹持器
手指夹持器广泛用于机器人技术,由至少两个数字组成,这两个数字可以彼此靠近以捕获物体。ROS 2 Gem 中的手指抓手是通过碰撞和接触来模拟的。 它是一个组件,用于控制附加到同一实体树的 PhysX Articulation Link 顶部的转动电机。
Finger Gripper 组件具有以下参数,这些参数是微调夹持器行为所必需的:
- 速度 epsilon,它确定夹持器仍可被视为静止的最大速度。
- 目标容差,即夹持器与目标位置之间的最大距离,仍算作达到目标。
- Stall time(失速时间),用于确定夹持器的手指是否移动的参数。这是考虑夹持器静止需要的时间。换句话说,较短的停顿时间可能会导致过早报告成功。
夹爪动作服务器
Gripper Action Server 组件与 Vacuum 抓手或 Finger 抓手通信,并将其 API 作为动作服务器公开给 ROS。它允许您配置 action server 名称。
局限性
- 目前,这两个夹持器都仅适用于 PhysX 关节。
- 它们可以与刚体和关节交互,但只能附加到关节链接。
- 真空抓手很简单,只能抓取带有“Grippable”标签的物体。
Running with MoveIt2
您可以将 MoveIt2 框架配置为具有一个可以规划夹持器移动的移动组。 这样的移动组是在 Ros2RoboticManipulationTemplate 提供的 ROS 2 launch 文件中实现的。 在提供的示例中,将 Rviz2 的“MotionPlanning”插件中的“规划组”更改为“hand”。 您现在可以使用“Joints”标签移动机械手的关节。
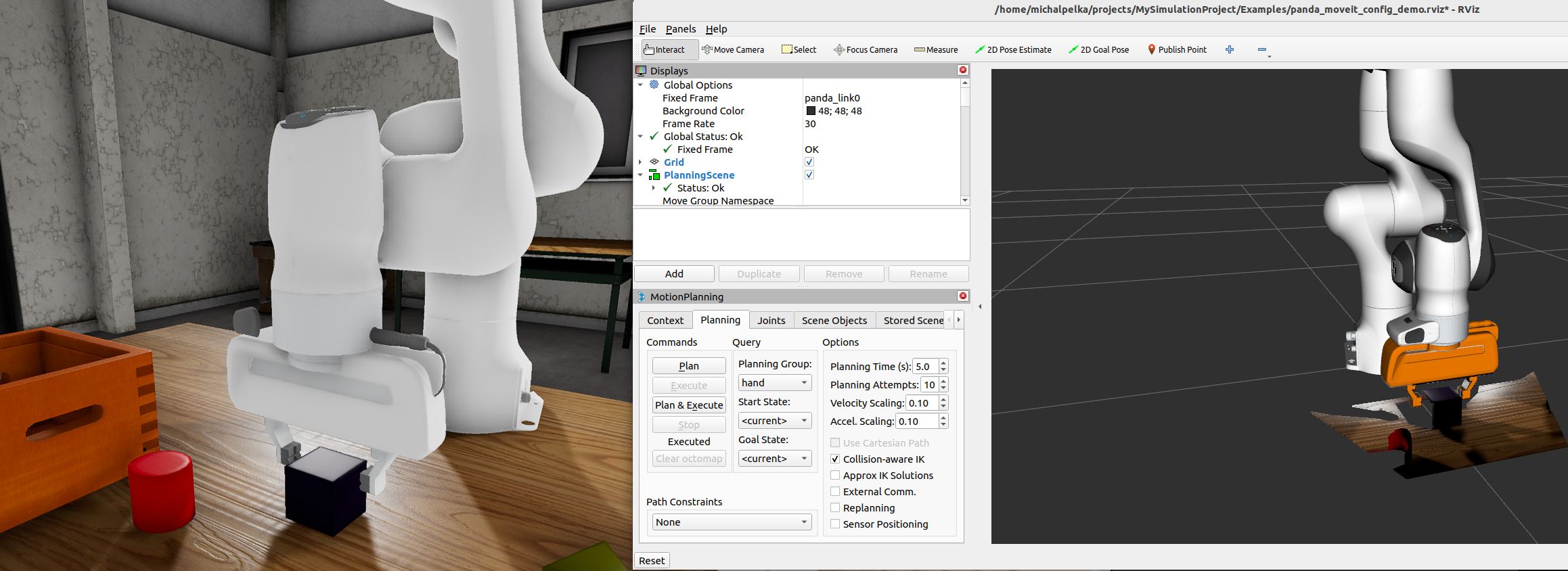
请参阅 关节操纵了解有关使用 MoveIt2 进行集成和控制的更多信息。