IN THIS ARTICLE
导入机器人
Open 3D Engine (O3DE中的 ROS 2 Gem 包括一个 机器人导入器 工具,用于导入 ROS 2 生态系统中使用的机器人描述。
关于支持的 robot 描述格式
SDFormat、URDF 和 XACRO 是 ROS(机器人操作系统)生态系统中广泛使用的机器人描述标准。
SDFormat 是一种基于 XML 的文件格式,用于描述 robot 模拟的对象和环境。SDFormat 最初是为 Gazebo 模拟器开发的,现已发展成为一个涵盖模拟所有方面的综合标准,包括静态和动态对象、视觉材质和物理属性。
Unified Robot Description Format (URDF) 是一种基于 XML 的文件格式,它以结构化和标准化的方式描述机器人的物理特性。它包括有关机器人的关节、链接、传感器和其他组件的信息,以及它们的属性,例如质量、惯性和几何形状。
XML Macros (XACRO) 是一种宏语言,可简化 URDF 文件的创建和维护。XACRO 允许您使用 XML 宏生成 URDF 文件。在 XACRO 中,您可以定义参数并包含文件,这对于更改和迭代机器人模型非常有用。您还可以在多个机器人模型中扩展和重用 XACRO。
URDF、XACRO 和 SDFormat 文件包含完整的机器人描述,包括对外部几何文件的引用。虽然您可以直接在机器人描述文件中定义基元几何图形,但通常的做法是使用 DAE (Collada) 或 STL 等格式的外部网格文件来表示机器人的视觉和碰撞形状。
机器人模型通常以软件包的形式提供,其中包括机器人描述文件和具有可视化和碰撞形状的其他几何文件,可以是基元几何图形,也可以是外部网格文件。这些软件包可以作为 ROS 工作区分发,在 ROS 应用程序中使用起来更直接。
Robot Importer 简介
使用 ROS 2 Gem 中包含的 Robot Importer 将机器人导入您的 O3DE 模拟项目。Robot Importer 具有以下功能:
- 指导您逐步完成导入过程。
- 允许您更改导入的参数,包括资产的搜索路径。
- 读取 SDFormat、URDF 和 XACRO 文件。
- 将所有必需的 assets 文件复制到 O3DE 项目的
Assets文件夹中。 - 使用关节或经典刚体和关节组件创建具有多体结构的Prefab。
将机器人导入到你的模拟项目中
先决条件
根据机器人描述文件的内容,您可能需要使用软件包及其依赖项构建 ROS 工作区。这可确保 Robot Importer 可以找到所有必需的文件。在某些情况下,可以改为在向导中附加 Robot Importer 使用的路径,并完全跳过 ROS 工作区的构建。
要构建,请创建一个工作区并运行colcon build。在启动 O3DE 编辑器之前,不要忘记获取 ROS 2 工作区。
有关更多信息,请参阅机器人描述包的文档,该文档通常包含在 GitHub 存储库的 README 文件中。
使用 Robot Importer 加载机器人定义文件
加载您的项目并在 O3DE 编辑器中选择一个级别。
通过执行以下任一操作,从 Editor 启动 Robot Importer:
选择 Main Menu > Tools > Robot Importer
在工具栏中点击 Robot Importer 图标
阅读 Robot Importer 中的信息页面。然后选择 Next.
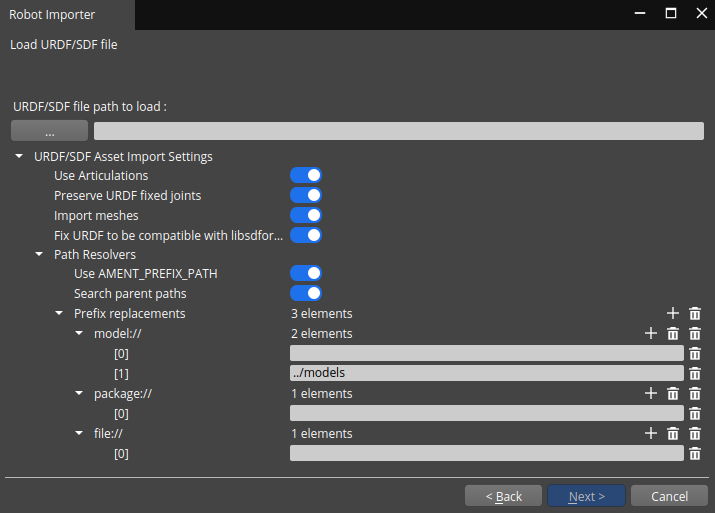
通过执行以下操作加载描述文件:
- 通过单击 […] 按钮选择要导入的 SDFormat、URDF 或 XACRO 文件。
- 有许多选项可用于修改导入器的行为:
- Use Articulations (使用关节) - 确定是否应该将 PhysX 关节组件用于关节和刚体。
- 保留 URDF 固定关节 - 设置后,将保留在导入 URDF 文件时找到的任何固定关节。这可以防止 libsdformat 中的关节缩减逻辑合并这些关节的链接。
- 修复 URDF 以与 libsdformat 兼容 - 它允许您导入一些不完全兼容的 URDF 或 XACRO 文件。启用此功能后,Robot Importer 将尝试调整 URDF 代码以使其兼容。
- 路径解析器 - SDFormat、URDF 和 XACRO 文件几乎总是引用一些其他文件(如网格和纹理)。此功能允许您提示 Robot Importer 在何处查找这些资产。
在高级情况下,例如导入旧文件或尝试导入 ROS 1 包,此功能可能很有用。
重要 此功能不会影响 XACRO 解析,因为此时使用的是与 ROS 2 安装捆绑在一起的 XACRO。 - 使用
AMENT_PREFIX_PATH- 使用 AMENT_PREFIX_PATH 环境变量来查找资产引用。这是 ROS 2 描述包的默认行为。 - Prefix Replacement (前缀替换) - 这是一个映射,允许您确定前面描述的 Path Resolvers 的路径。
- 点击 Next.
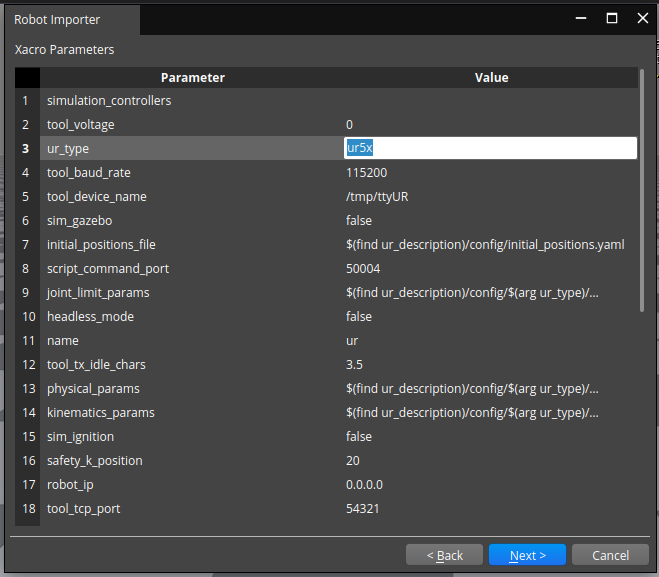
(可选)如果要导入的文件包含参数的 XACRO 文件,请设置参数的值。要编辑参数,请 双击 该值。完成后,单击 Next。
 Note:
Note:如何设置参数取决于要导入的 XACRO 项目。要成功导入,请参阅 XACRO 项目的文档。
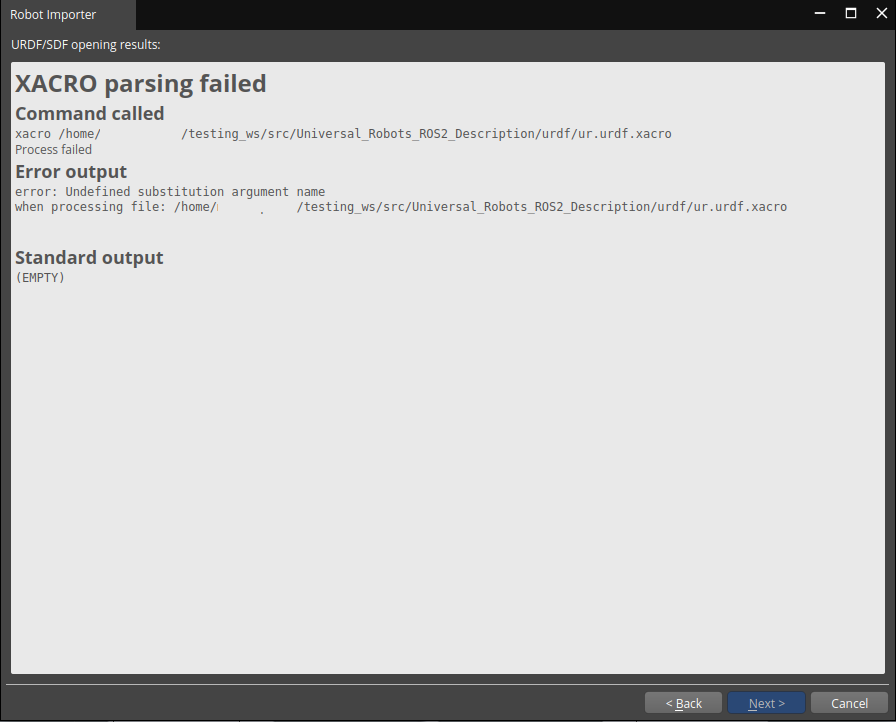
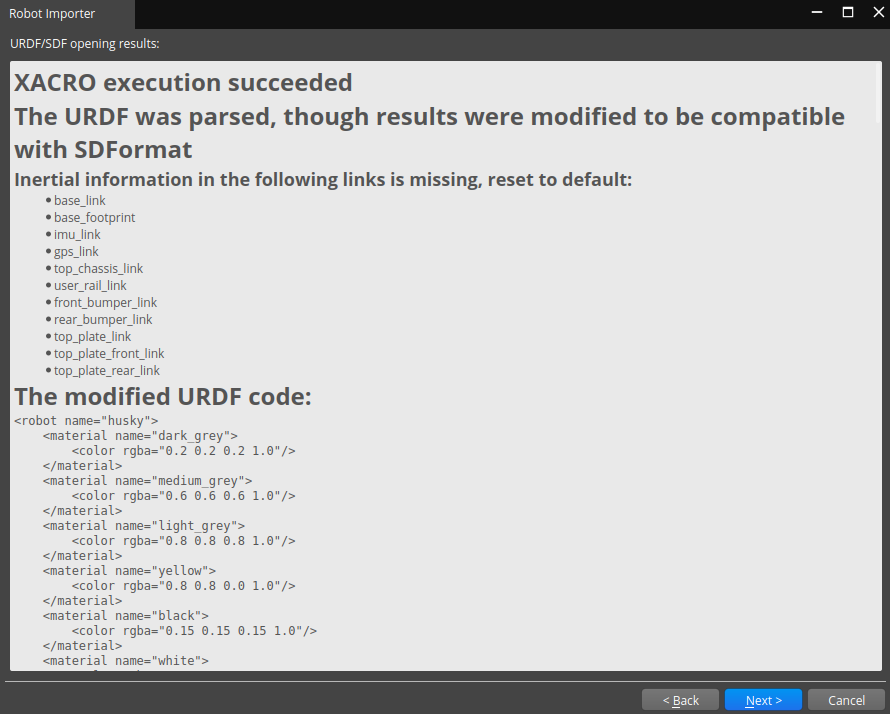
如果您的 XACRO 项目导入失败,您将看到一条消息,其中包含 ROS 2 XACRO 可执行文件的输出,类似于以下内容。
(可选)如果 XACRO 或 URDF 包含一些缺失信息,将自动调整。 如果您在第 4 点中启用“修复 URDF 以与 libsdformat 兼容”选项,则此功能可用。 目前,一些常见问题已解决:
缺少惯性矩阵,质量以默认值添加,
Robot Importer 更改名称以使关节名称唯一。 在此自动调整之后,您可以查看所做的更改,并浏览修改后的 URDF。
 Note:通过“Fix URDF to be compatible with libsdformat”选项,您可以成功导入与模拟不兼容的 URDF 文件,但请记住调整生成的Prefab。
Note:通过“Fix URDF to be compatible with libsdformat”选项,您可以成功导入与模拟不兼容的 URDF 文件,但请记住调整生成的Prefab。
处理机器人资产
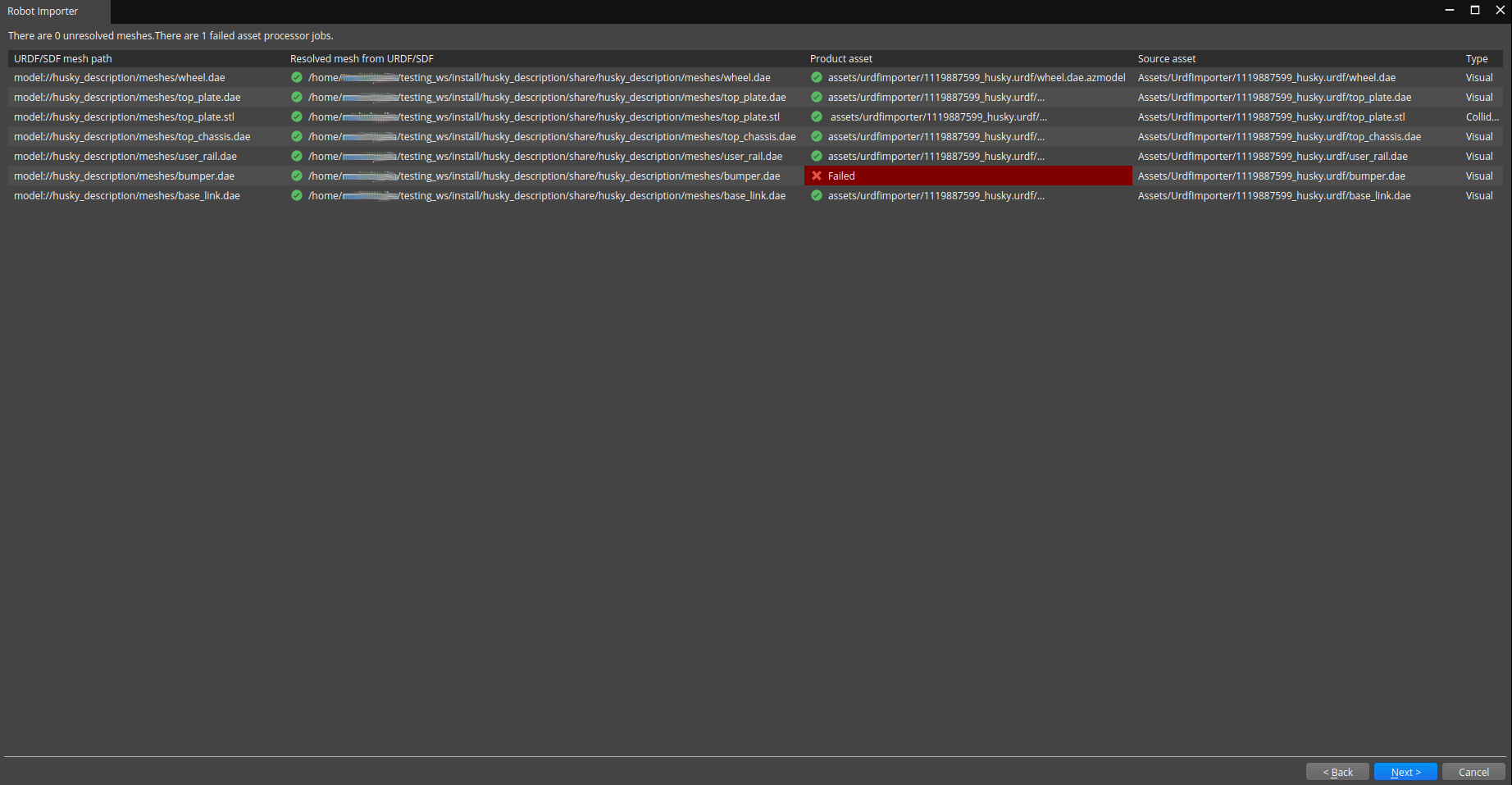
加载描述文件后,Robot Importer 会显示一个表格,其中包含模型中使用的所有资产的列表。 表的每一行都描述一个资产,信息分为以下列:
URDF/SDF mesh path - 网格的相对文件路径,如 URDF 文件中所定义。
Resolved mesh from URDF/SDF - 位于文件系统中的网格的绝对文件路径。
Product asset - 生成的产品资产(例如
*.azmodel,*.pxmesh)在 O3DE 项目的Cache目录中的相对文件路径。Source asset - O3DE 项目的
Assets目录中源资产的相对文件路径。Type - 资产的类型。
成功加载的资产带有绿色复选标记,而加载失败的资产则标记为红色。
要查看有关每个资产的其他信息,请 双击 其行。这将打开 O3DE Asset Processor,其中显示导入详细信息。此信息对于排查导入失败的资源问题特别有用。
完成后单击 Next。
如果导入资源时出现问题,该怎么办?
如果 Source asset 字段标记为失败,则 Robot Importer 无法在文件系统中找到对网格文件的引用。 在这种情况下,请确保正确构建和获取机器人的描述包。 您可以尝试在第 4 点中提供一种自定义方法来解析前缀。
如果 Product asset 字段标记为失败,则 Asset Builder 无法构建产品资产。
请参阅 Asset Processor 输出或/user/log目录中的日志文件。
您可以立即解决问题,也可以在使用 Robot Importer 完成后解决问题:
- 要解决此问题,请单击 Back 并解决网格文件的问题。然后单击 Next 重试导入。
- 要稍后解决,请单击 Next 并完成 URDF 导入。然后在 O3DE 编辑器中添加缺失的网格。
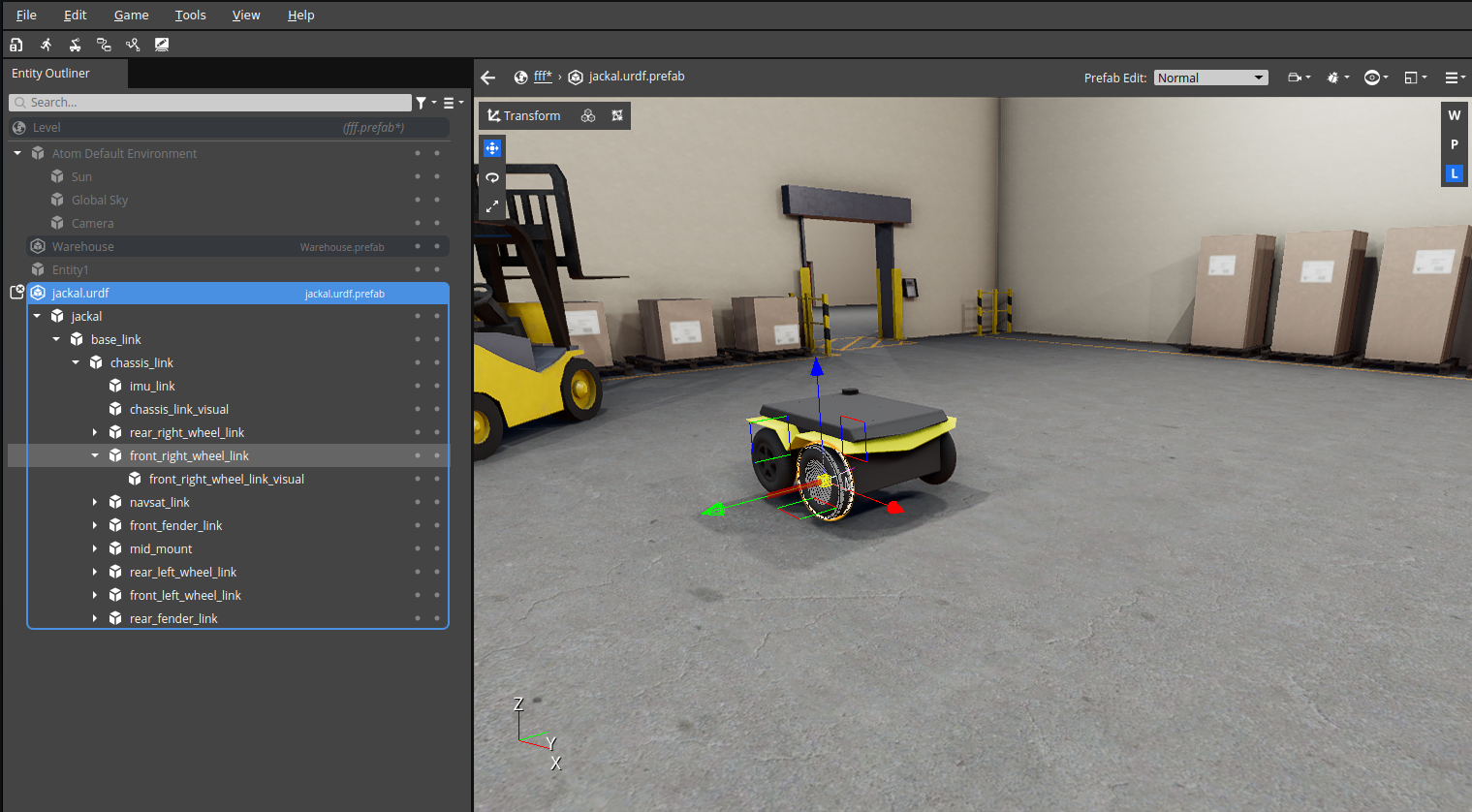
创建机器人Prefab
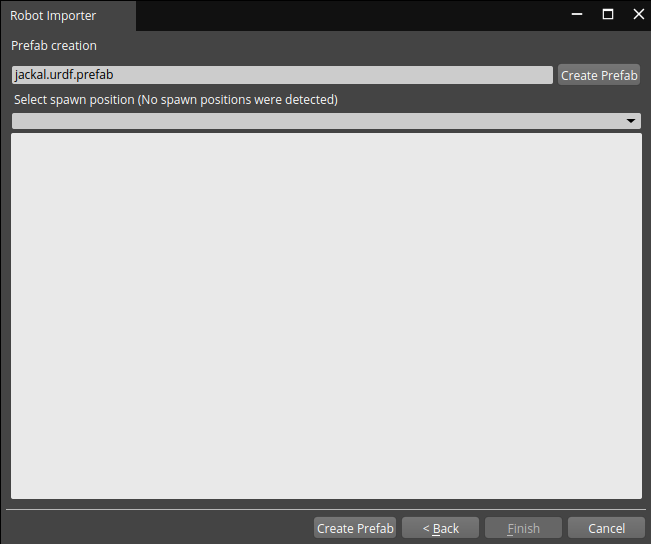
- 通过执行以下操作创建Prefab:
输入Prefab名称。
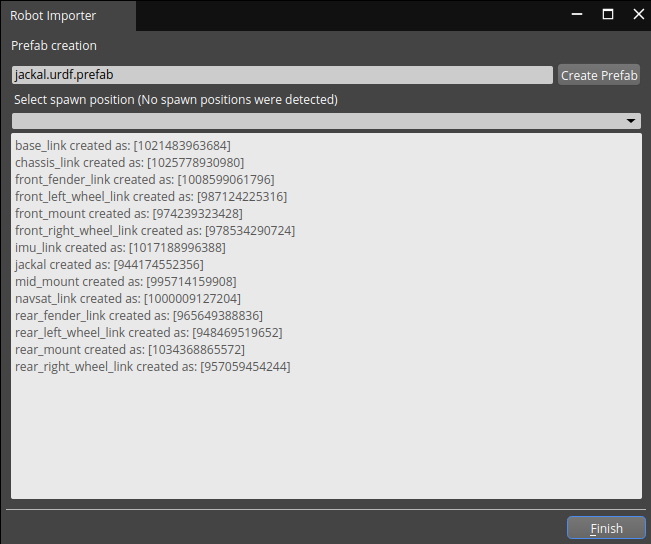
- (可选) 选择生成位置。 如果场景中添加了生成点,则可以在下拉菜单中选择一个生成点。 -点击Create Prefab.
创建Prefab后,查看生成的实体的摘要。
最后,场景中有一个Prefab。您可以添加一个或多个 传感器 或使用 ROS 2 车辆动力学或使用 关节操作移动机器人。
重新导入机器人
使用 Robot Importer 重新导入 URDF 文件。在某些情况下,如果之前正确导入了资源(网格文件),则它们不会更新。要解决此问题并执行完全重新导入,请使用 Asset Browser (资源浏览器) 或在目录中删除项目资源。
更多信息
有关支持的 SDFormat 传感器的详细信息,请参阅 SDFormat 传感器子页面。有关 SDFormat 模型插件的其他信息,请参见 SDFormat 插件子页面。您可能有兴趣在 Importing Turtlebot4 子页面查看 Turtlebot4 robot 的更详尽的导入描述。