IN THIS ARTICLE
导入 Turtlebot 4
介绍
TurtleBot 4 是一个用于教育和研究的开源机器人平台。此机器人的 URDF 描述以 ROS 2 包的形式提供,这使得它易于安装和使用 Robot Importer 进行测试。您应该参考 介绍到 Robot Importer 工具,以获得导入步骤的更详细说明。
先决条件
从 ROS 2 安装必要的软件包:
sudo apt install ros-${ROS_DISTRO}-turtlebot4-description ros-${ROS_DISTRO}-turtlebot4-msgs ros-${ROS_DISTRO}-turtlebot4-navigation ros-${ROS_DISTRO}-turtlebot4-node
导入机器人
机器人导入器向导
打开 Robot Importer 工具并选择输入文件。您应该在 ROS 2 安装文件夹中找到它。默认情况下,该文件位于路径 /opt/ros/${ROS_DISTRO}/share/turtlebot4_description/urdf/standard/turtlebot4.urdf.xacro 中。接下来,关闭前两个切换开关,如下图所示。
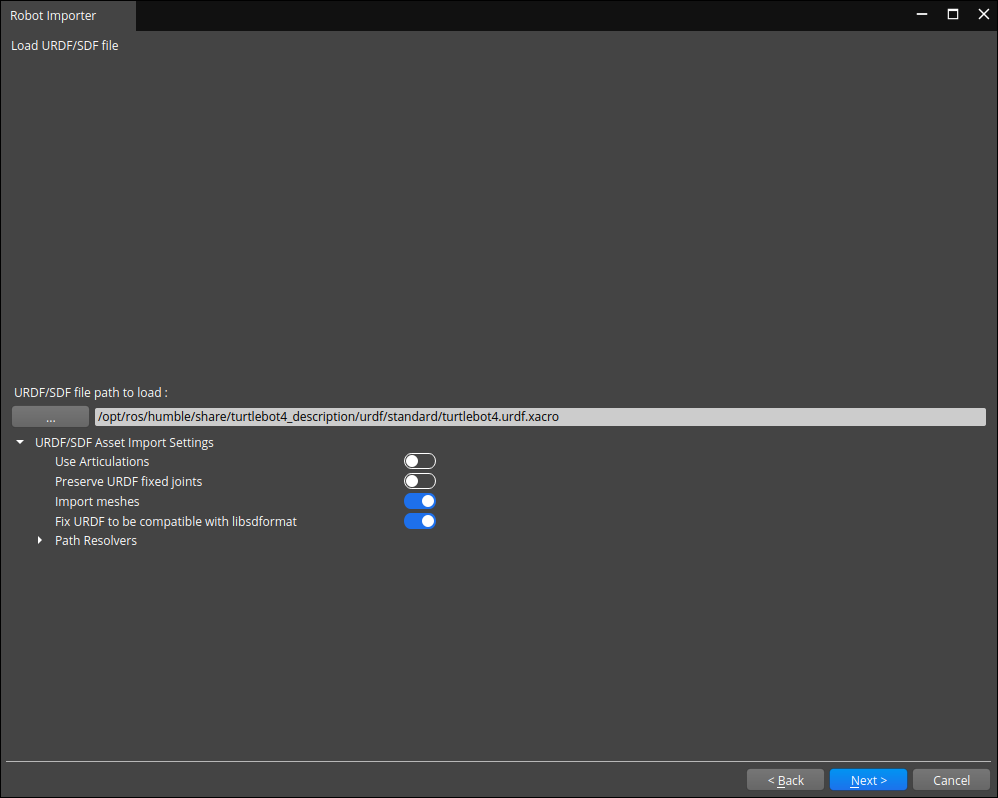
Use Articulations切换确定是否应将 [PhysX 关节组件]https://nvidia-omniverse.github.io/PhysX/physx/5.1.0/docs/Articulations.html) 用于关节和刚体。尽管与添加关节相比,铰接通常优于模拟机构,但它们更难设置(例如,它们对链接惯性配置非常敏感)。使用关节可能会让您跳过一些问题。第二个开关Preserve URDF fixed joints将允许导入器降低模型的复杂性。此方法的可用性取决于 URDF 实现,您可能希望尝试在设置和未设置此选项的情况下导入机器人,以检查是否获得更好的结果。
导入后修改
根据机器人描述,导入器可能会创建彼此相交的碰撞器,从而导致在启动模拟时机器人发生 explosion。Turtlebot 4 的base_link 和 wheels之间存在碰撞。为了缓解此问题,您可以删除 base_link 碰撞器或将碰撞器放在不同的碰撞层上。最后但同样重要的是,您可以重新设计碰撞器,使它们不相交。我们建议在base_link中禁用碰撞器作为快速修复,并相应地设置碰撞层作为最后的润色。
机器人控制
Turtlebot 4 由libgazebo_ros2_control插件控制,机器人导入器不支持该插件。相反,您可以手动将
Skid Steering 添加到机器人以使其驱动。为此,请在 base_link中添加三个组件:
Skid Steering Twist ControlROS2 Robot ControlSkid Steering Vehicle Model
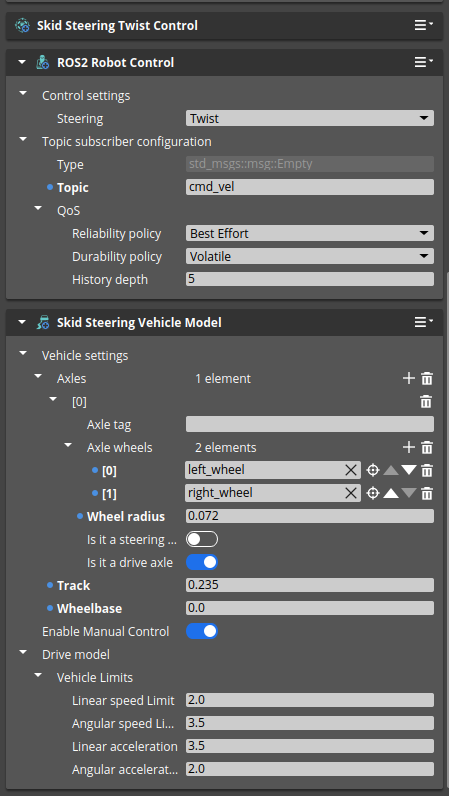
最后一个组件 Skid Steering Vehicle Model 至关重要,因为它包含车辆动力学的参数并链接到车轮实体。首先,设置车辆限制、轨道和轴距。接下来,添加一个车轴,并链接到 left_wheel 和 right_wheel 实体。切换切换开关以将此车桥标记为驱动车桥。最后,设置车轮半径。ROS 2 主题配置可以在 ROS2 Robot Control 组件中更改。示例配置如下所示:
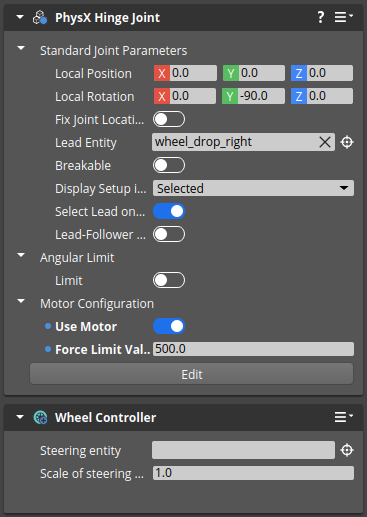
最后,您需要将 Wheel Controller 组件添加到 left_wheel 和 right_wheel 实体,并在两个车轮实体的铰链关节中切换 Use Motor 标志。您可以将Force Limit Value 更改为更高的值,以确保平稳驾驶。right_wheel的配置如下所示。
传感器
机器人导入器正确导入了连接到 Turtlebot 4 机器人的多个 传感器 ,但并非所有传感器都被正确解析,也不是所有传感器都按设计添加 - 根据您的需要,需要进行一些手动调整:
- LiDAR 传感器连接到
rplidar_link,如机器人描述中所定义 - 由于
libgazebo_ros_create_imu插件不受支持,imu_link中缺少 IMU 传感器 - RGBD 相机传感器已添加到
oakd_rgb_camera_frame链接中,但应调整传感器的方向 - ir 传感器作为 LiDAR 传感器导入
- Robot Importer 将完全跳过这些_contact sensors_,因为不支持
激光雷达传感器可能无法正常工作的原因与机器人本身相同,即由于自碰撞。要解决此问题,您可以删除或禁用一些导致这些自碰撞的碰撞器。然而,更理想的解决方案是分配不同的碰撞层,以区分应该和不应该与 Lidar 传感器交互的物体,从而防止不必要的干扰。