IN THIS ARTICLE
关节操作
概述
对于涉及机械臂或其他关节系统(如腿部运动)的应用,操纵关节至关重要。 O3DE 支持通过 ros2_controllers 等软件包使用 ROS 控制关节系统, 以及与 MoveIt2 的集成。
Note:该操作功能可在ROS2ControllersGem中使用。
支持的功能
使用操作组件,您可以:
- 使用 JointsManipulationComponent 自动发布 JointState 条 ROS 消息。
- 通过 FollowJointTrajectory ROS 动作控制关节系统。
- 基于铰接以及铰链和棱柱关节的控制系统。
- 为开发人员扩展接口,以便通过 JointsManipulationRequests 和 JointsPositionControllerRequests 实现您自己的控制组件。
- 在多机器人场景中使用操作组件。
限制
操纵组件仅适用于单自由度关节。
组件及其交互
关节的移动是通过一组实现它们的接口和组件来处理的。
| 接口 | 组件 | 规则 |
|---|---|---|
| JointsPositionControllerRequests | JointsArticulationControllerComponent JointsPIDControllerComponent | 将关节移动到所需位置。 |
| JointsManipulationRequests | JointsManipulationComponent | 保持并发布关节状态信息,将命令中继到控制器。 |
| JointsTrajectoryRequests | JointsTrajectoryComponent | Host 动作服务器用于轨迹命令,通过一系列位置控制轨迹。 |
模拟关节系统
快速开始使用 Manipulation Template
如果你的目标是模拟机械臂,最快的开始方法是从 Manipulation Template 创建项目。
如果您按照
项目配置的步骤操作,将设置O3DE_HOME和 PROJECT_PATH的环境变量,并注册模板。
使用以下命令创建新项目:
${O3DE_HOME}/scripts/o3de.sh create-project --project-path $PROJECT_PATH --template-name Ros2RoboticManipulationTemplate
该模板附带了几个示例,您可以按照其 README .
配置你的机器人
导入机器人
项目完成后,使用
机器人导入 功能将您选择的机器人加载到 O3DE 中。
确保在导入器的最后一页上选中复选框 Use articulation for joints and rigid bodies。
强烈建议使用关节来稳定模拟机械臂和其他关节系统。
添加必要的组件
如果导入继续没有问题,请打开新创建的Prefab的根实体并添加三个新组件:
JointsArticulationControllerComponent来控制机器人的运动。JointsTrajectoryComponent以侦听 MoveIt 轨迹消息。JointsManipulationEditorComponent它发布joint_states并设置初始位置。
在关节中启用转动电机
在所有关节上启用转动电机,并设置 motor force limit, stiffness 和 damping 值。启用转动电机的关节将保持其设置位置。
设置初始位置和主题名称
- 在
JointsManipulationEditorComponent中,为所有关节添加初始位置。 关节名称可以在ROS2FrameComponent关节名称内的Prefab实体中找到。初始位置以弧度为单位。 - 在
JointsTrajectoryComponent中,设置用于控制轨迹的主题。 通常,此主题名称以joint_trajectory_controller结尾,但应与 MoveIt 配置文件中的名称相同。
开始模拟
开始模拟并查看机器人如何将自身设置到初始位置。如果出现错误,请检查 O3DE 控制台的日志,其中包括所有关节名称。 现在,机器人已准备好使用 MoveIt 进行控制。
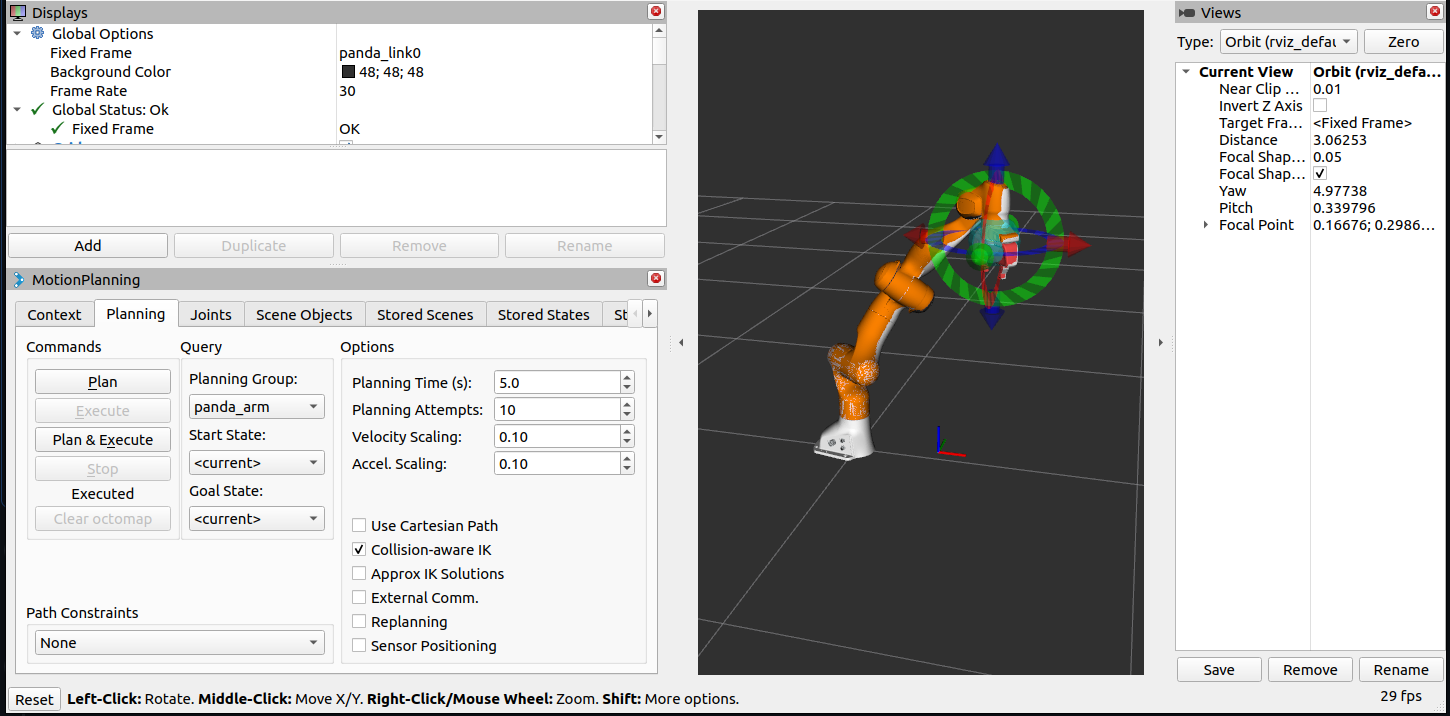
使用 MoveIt2 运行
为您的 ROS 发行版安装 moveIt 软件包:
sudo apt install ros-${ROS_DISTRO}-moveit ros-${ROS_DISTRO}-moveit-resources
之后,准备 MoveIt 启动文件。这可以通过使用机器人提供的配置手动创建文件来实现。 或使用 MoveIt 设置助手 .
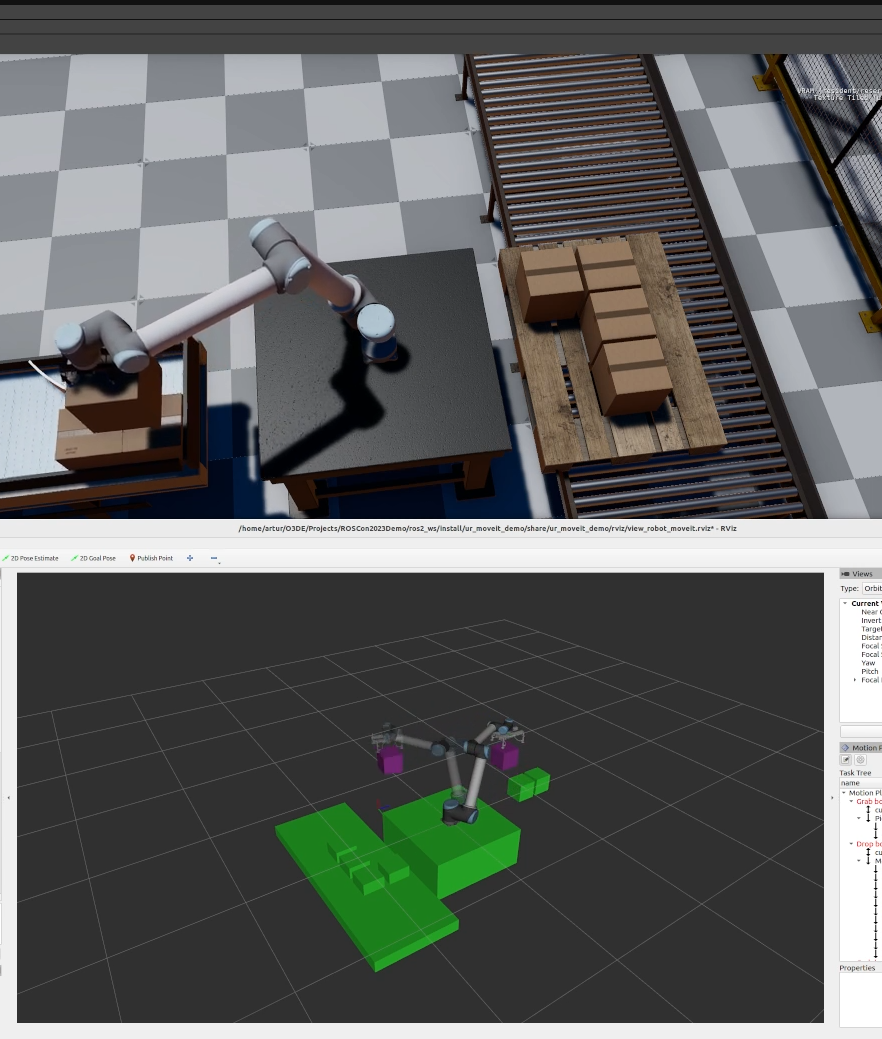
您可以在 Manipulation Template (操作模板) 中看到两个示例。
最后,运行启动文件并使用 MoveIt 控制模拟的关节系统。
相关主题
| 主题 | 说明 |
|---|---|
| 抓手 | 在 O3DE 中模拟机器人抓手 |