IN THIS ARTICLE
ROS 2 车辆动力学
Vehicle Model
VehicleModelComponent 用于将目标速度、转向或加速度等输入转换为车辆(机器人)部件上的物理力。VehicleModel 有一个 VehicleConfiguration,用于定义车轴、参数化和分配车轮。该模型需要每个轮子实体中都存在 WheelControllerComponent。它还使用 DriveModel 的实现,将车辆输入转换为作用在转向元件和车轮上的力。
Note:该功能可在ROS2ControllersGem中使用。
Wheel Controller
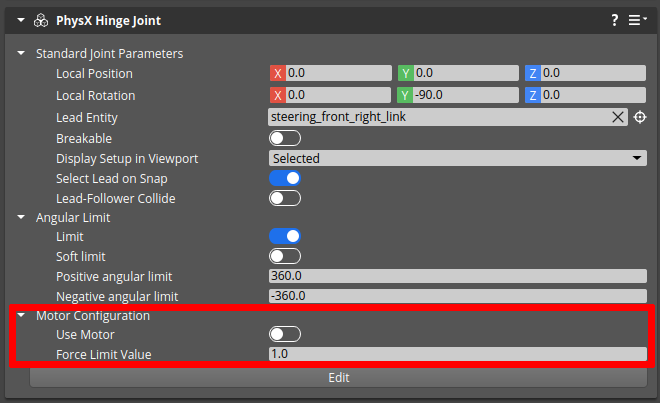
车轮控制器是应连接到车辆车轮的控制器。轮子实体应附加 PhysX Hinge Joint (PhysX 铰链关节)。联合控制器应具有:
- Motor Configuration / Use Motor 已启用。
- Motor Configuration / Force Limit Value 设置为 可取的 值。
车轮控制器具有以下参数,如下所示。

| 参数名 | 说明 |
|---|---|
| Steering Entity | 具有 PhysX Hinge Joint (PhysX 铰链关节) 的实体,该关节可更改轮子的方向。 |
| Scale of steering axis | 允许用户更改车轮转向的比率或/和方向。 |
Ackermann Drive Model
AckermannDriveModel 的实现使用 PID 控制器 。该模型计算车辆接头中的速度或力,并相应地将其应用于命令速度。
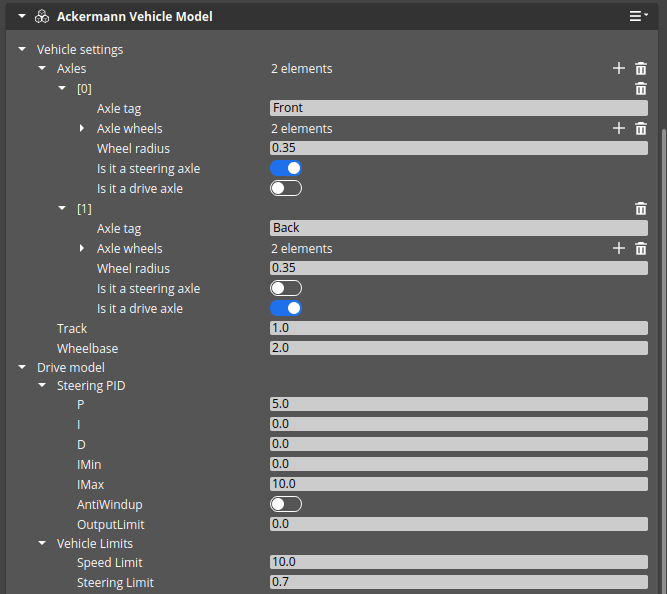
模型的参数通过 AckermannVehicleModelComponent公开给用户:
| 参数名 | 说明 |
|---|---|
| DriveModel / Axles | 车辆的车轴列表。 |
| DriveModel / Axles / Axle Wheels | 轴中的轮子列表。 |
| DriveModel / Axles / Is it a steering | 如果启用,Ackermann Drive Model 将应用转向角。 |
| DriveModel / Axles / Is it a drive | 如果启用,Ackermann 驱动模型将施加驱动力。 |
| DriveModel / Axles / Track | 前后轴之间的距离。 |
| DriveModel / Axles / Wheelbase | 左右轮之间的距离。 |
| DriveModel / Steering PID / P | 用于转向伺服的 PID 控制器的比例增益。 |
| DriveModel / Steering PID / I | 用于转向伺服的 PID 控制器的积分增益。 |
| DriveModel / Steering PID / D | 转向伺服的 PID 控制器的导数增益。 |
| DriveModel / Steering PID / IMin | PID 的集成影响最小。 |
| DriveModel / Steering PID / IMax | PID 的集成影响最大。 |
| DriveModel / Steering PID / AntiWindUp | 防止 PID 中的积分缠绕。 |
| DriveModel / Steering PID / OutputLimit | 将输出钳制到最大值。 |
| DriveModel / Vehicles Limits / Speed limit | 可实现的最大线速度(以米/秒为单位)。 |
| DriveModel / Vehicles Limits / Steering limit | 可实现的最大转向角。 |
Skid Steering Drive Model
该模型计算车辆接头中的速度,并将其相应地应用于命令的速度和配置。
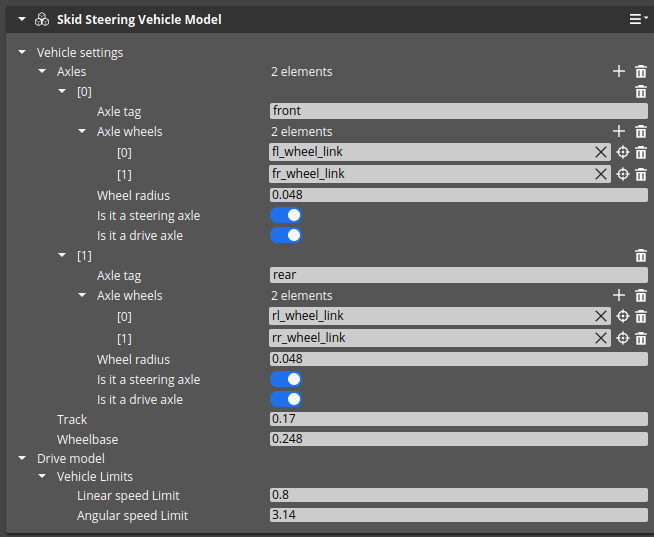
模型的参数通过 AckermannVehicleModelComponent公开给用户:
| 参数名 | 说明 |
|---|---|
| DriveModel / Axles | 车辆的车轴列表。 |
| DriveModel / Axles / Axle Wheels | 轴中的轮子列表。 |
| DriveModel / Axles / Is it a steering | 在此模型中,它将被忽略。 |
| DriveModel / Axles / Is it a drive | 如果启用,Skid Steering Drive Model 会将速度应用于轴的车轮。 |
| DriveModel / Axles / Track | 前后轴之间的距离。 |
| DriveModel / Axles / Wheelbase | 左右轮之间的距离。 |
| DriveModel / Vehicles Limits / Linear speed limit | 可实现的最大线速度(以米/秒为单位)。 |
| DriveModel / Vehicles Limits / Angular speed limit | 可达到的最大角速度(以弧度/秒为单位)。 |
手动控制
VehicleModel 将处理名称为“steering”和“accelerate”的输入事件。这意味着您可以将 InputComponent 添加到同一实体,并为输入设备(例如键盘或游戏手柄)定义输入映射以手动控制车辆。
您可以使用 rqt_robot_steering 等工具通过 Twist 消息移动您的机器人。RobotControl 适合与 ROS 2 导航堆栈 一起使用。
可以使用此组件实现自己的控制机制。